Open Pilot uses a smartphone to enable your car to achieve LEVEL 2 autonomous drive Retrofit your old car into level 2 car! 20190902 ** AFAIK the latest 0.6.3 openpilot supports 'vision radar' can output the lead car distance by its internal camera, so should be a good replacement for people trying aftermarket ACC without FMCW radar!! ** Comma Pedal (google it if you do not know about it) can also use to replace my modification of 'cruise control switch' approach with more 'smooth' acceleration/slow down. ============== 2019-12-11 check this great old car openpilot project here! a lot useful information https://github.com/Lukilink/openpilothttps://www.youtube.com/watch?v=L1u6AkSpR98 ============== The latest version: homemade ACC with FMCW radar + CC control Actually, it is not impossible. Modern car with cruise control is possible to integrate ACC function without modifying the throttle & brake pedal. On highway, you may try to maintain your car speed with purely cruise control switch (plus and minus switch) then you may notice it is possible to keep ahead car distance without touching throttle pedal and brake pedal. Based on this idea, I follow up many previous studies results (find the reference list in this page below); some prototypes were implemented. In order to build an aftermarket ACC, several issues are needed to solve. 1. The first is how to measure the ahead car distance reliably, considering harsh weather conditions, curve roads & detect lane marks, etc, and fuse all data together? 2. The second, how to control your car speed without adding additional servo motors and hack into your car computers? 3. The third is how to design a good algorithm to control the car smoothly with limited sensor information (sometimes the sensors are very unreliable, filtering is necessary). Again, sensor fusion is a key issue. For first issue, I tried a camera solution from a Chinese company which kindly provided me the protocol to read their ADAS camera to know the TTC (time to collide) of the ahead car. This works but very unreliable in bad weather condition and while the ahead car is far, but for short-distance < 20m camera is good. I turn out seeking FMCW radar solutions from Continental/Bosch/Delphi/TI, but the high price (> 1000~2000 USD each) and limited protocol can be accessed as I am not a big car company again prohibited me to use their solutions. Eventually a Chinese company ( website: mwradar.com ) offered me a FMCW radar at relative inexpensive price, which is specially design for doing FCW (front collision warning) system. I converted it into for measuring ahead car distance. This company kindly provided me part of the radar protocol on CAN bus so I can read some information about the ahead car, including distance in two dimension and velocities, although not very accurate and some issues still existed, this FMCW radar is much reliable while measuring cars in long distance (< 70m is reliable, and up to 140m is possible). The second point current I use the cruise control (CC) switch to control my car speed. Refer to the following figure the signal of CC control switch is generated by applying different resistances while you pressing different CC keys. I use relays to simulate the keys to send speed up/down signal to the car. The advantage is that only need to wired two wires from CC, and is possible to apply to all old cars with CC. The future plans to build robotic fingers to simulate human to manipulate CC switches, so no intrusion to the wires of the car will be made. By this way, we can easily apply this system to ALL the existing old cars. The third, I think could be one of the difficult parts, is how to control the car smoothly with only CC. The current design is based on TTC to control and keep the ahead car distance, i.e., maintain the car distance as TTC at 2.1 seconds. This is decent as the two prototypes were used this approach. So if your car runs at 110 kph the TTC = 2.1 s then the distance is 70 m, and will drop to 23.3 m if the speed is 40 kph. Now I am trying to fine-tune the algorithm to control the car. Maybe some AI / Machine learning should be added in this design to build a self-calibrate /learn system. As this is a private hobby project, I am looking for any possible support to this idea. I will release the design once the first stable release is done.  figure: TTC vs ahead car distance vs my car KPH 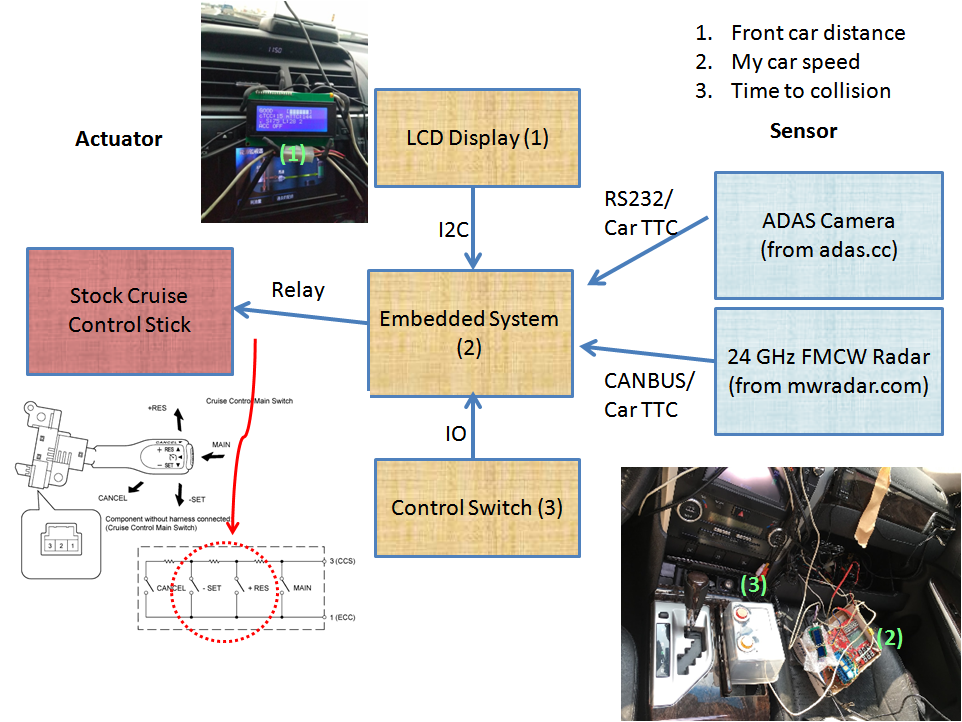 figure: homemade ACC system architecture 2018-2-2 Now I had been successful integrated the FMCW radar into my system, the distance between tracking car could up to 70m in highway stably. Compare to a camera ADAS the FMCW radar is more reliable in long-distance ( > 20m) & harsh environment (night, rain, fog, etc..). I will try to make this system more complete and release the design on this website. 2018-1-7 I got two FMCW radars, TI AWR1642BOOST & Smartmicro.de FMCW radar. Now AWR1642BOOST is work, but need additional efforts to make it into a product-like radar(considering object clustering algorithm, integrating CANBUS, reliability issue, weather-proof). ** I am looking for any devices that can output the distance from the front car to my car, no matter it is radar based or camera based system. Please let me know if you can provide this device for the experiment. huclee.nthu@gmail.com
You can find a discussion thread about this video ==> https://priuschat.com/threads/diy-adaptive-cruise-control.164713/ 這套系統是透過攝影機來計算與前車的距離,然後透過控制汽車的定速系統撥桿,達到固定與前車距離的目的。我現在還在找其他方案,包含雷達等來整合到本系統內。 自行diy作的自動跟車系統 這套系統是透過攝影機(adas.cc)+ FMCW Radar計算與前車的距離,然後來控制CC定速撥桿,自動與前車保持固定距離。除了CC之外,可以作到完全non-intrusive的aftermarket改裝套件(任何有的車都可改裝)。缺點是沒有辦法主動踩煞車與油門,因此緊適合較長距離(>50m)跟車,用放油門的方式來降速。 知远电子 的ADAS (http://adas.cc) ** Reference materials
diy homemade adaptive cruise control DRCC ACC 自家製レーダークルーズコントロール |


